 |
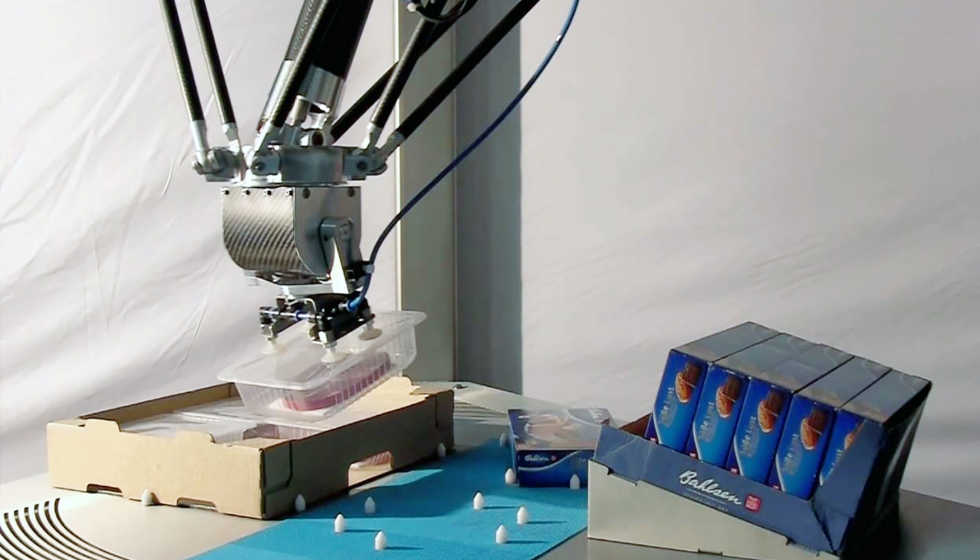
| Robot Delta Autonox24 Hygienic Design (HD). |
Los robots Delta (arañas) por su cinemática son ideales para realizar estas tareas, pues su limitación está en el peso del producto, siendo muy adecuado para productos de poco peso y delicados. Adicionalmente, en las líneas picking es necesario poder cambiar con cierta frecuencia la forma tanto del producto como del soporte que tiene que recibir el producto. Los robots Delta son altamente flexibles y se puede adaptar fácil y rápidamente a dichos requisitos del entorno gracias a su flexibilidad, muy superior al de los sistemas de packaging tradicionales. Pero no se trata únicamente de mecánicas, también debe ir acompañado de un software igual de rápido y flexible.
 |
| Robot Delta Autonox RL5 (5 ejes) en aplicación de encajado. |
La firma alemana Autonox24 cuenta con una amplia familia de robots delta, que comprenden desde robots de 3 ejes hasta 5 ejes, capacidades de carga de hasta 50 kilos para algunos de sus modelos, y una gama de robots delta con protección IP69K Hygienic Design para las aplicaciones más exigentes.
 |
| Robot Delta Autonox RL5 (5 ejes). |
 |
| Robot Delta Autonox24 Hygienic Design (HD). |
Otra de las problemáticas comunes del sector es la falta de espacio en las instalaciones, es donde la firma holandesa ABI destaca con su solución ABI Delta Wide, que permite ahorrar hasta un 50% de espacio frente a soluciones tradicionales.
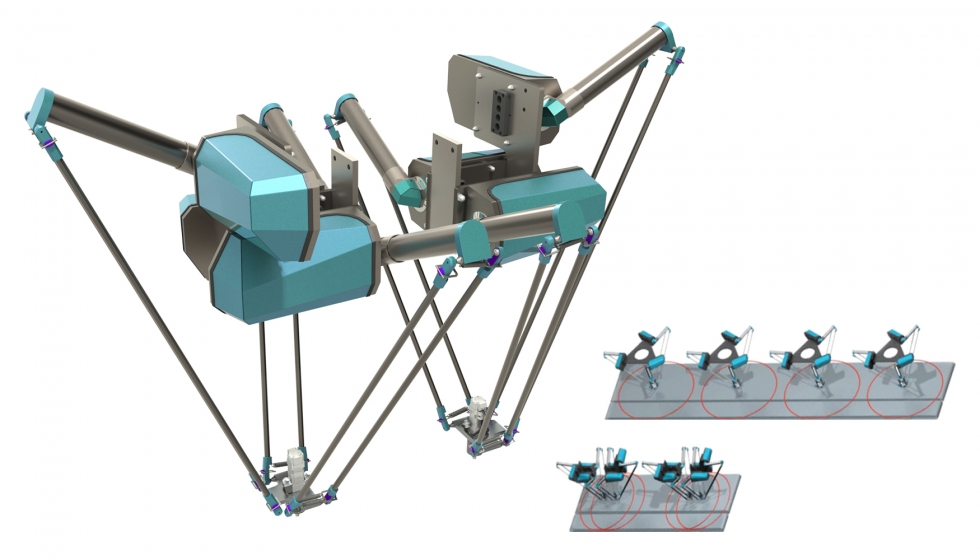 |
| Robot Wide Delta ABI. |
Desventajas de un sistema clásico PLC con Motion Control
En la mayoría de sistemas empleados en las líneas packaging y pick&place, un PLC con Motion Control es el encargado del movimiento del robot. Esto significa que un sistema de control robótico está basado en una transformación (posición y aceleración) y un ciclo de interpolación. Los comandos Motion se ejecutan de modo secuencial por medio de módulos de función. Por tanto, el desarrollador ha de combinar funcionalidades típicas de robot como trayectorías, jogging y seguimiento de objetos basados en estos comandos que requieren de un proceso muy costoso en términos de tiempo y dificultad.
- Dificultad para generar estrategias de pick&place en entornos dinámicos. Además, la optimización de estas trayectorias es un paso extremadamente crítico dado que son las que marcan la auténtica diferencia y el valor añadido de una línea frente a la competencia, afectando críticamente a la producción.
- Desperdician gran cantidad de recursos hardware que deben emplearse en funciones básicas del robot en lugar de destinarse en obtener ventajas competitivas que permitan optimizar la producción
- Problemas de integración: sistemas de referencia como la cinta transportadora y sus diferentes niveles, por ejemplo, tienen que ser alineados mecánicamente de forma muy precisa puesto que son horizontales entre sí. También se deben afrontar enormes complejidades en cuanto al procesamiento de imágenes.
- Costes económicos elevados por la ingeniería necesaria tanto para mantener el proyecto como para actualizarlo.
- Programación amigable para el usuario para implementar la aplicación de forma rápida y sencilla
- Rendimiento mejorado para la obtención de ciclos más cortos
- Reducción de tiempos y costes de ingeniería y minimización de riesgos
- Solución flexible y más competitiva.
 |
| Plataforma de control robótico Keba KeMotion D3. |
Este tipo de proyectos no está exento de riesgos, ya que el dimensionamiento y la estrategia son críticos para garantizar el éxito de la aplicación. Es por ello que el simulador offline de Keba KeMotion permite reducirlo a su mínima expresión, permitiendo planificar proyectos de plantas de producción y líneas completas, simulando su rendimiento real incluso antes de contar con la instalación robótica.
Por último y no menos importante, la vida útil y el consumo de cualquier máquina o dispositivo se tienen en cuenta cada vez más. Uno de los objetivos principales de Keba Intelligent Motion es la prevención eficiente de los bruscos procesos de inicio y parada que se producen por interrupciones repentinas del robot. Como resultado, se reducen las vibraciones y el consumo.
Interempresas
28 Octubre 2016









No hay comentarios.:
Publicar un comentario